
【标题】End-to-End Urban Driving by Imitating a Reinforcement Learning Coach
【作者】Zhejun Zhang, Alexander Liniger, Dengxin Dai, Fisher Yu, Luc Van Gool
【论文链接】https://arxiv.org/pdf/2108.08265.pdf
【发表日期】2021.8.18
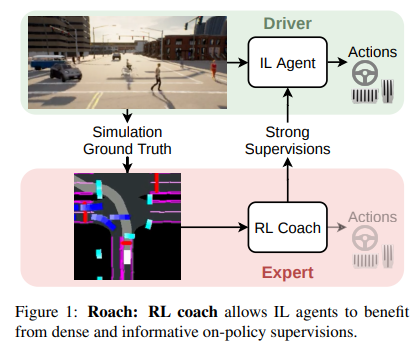
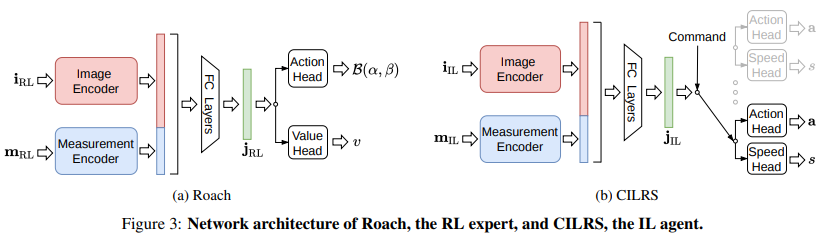
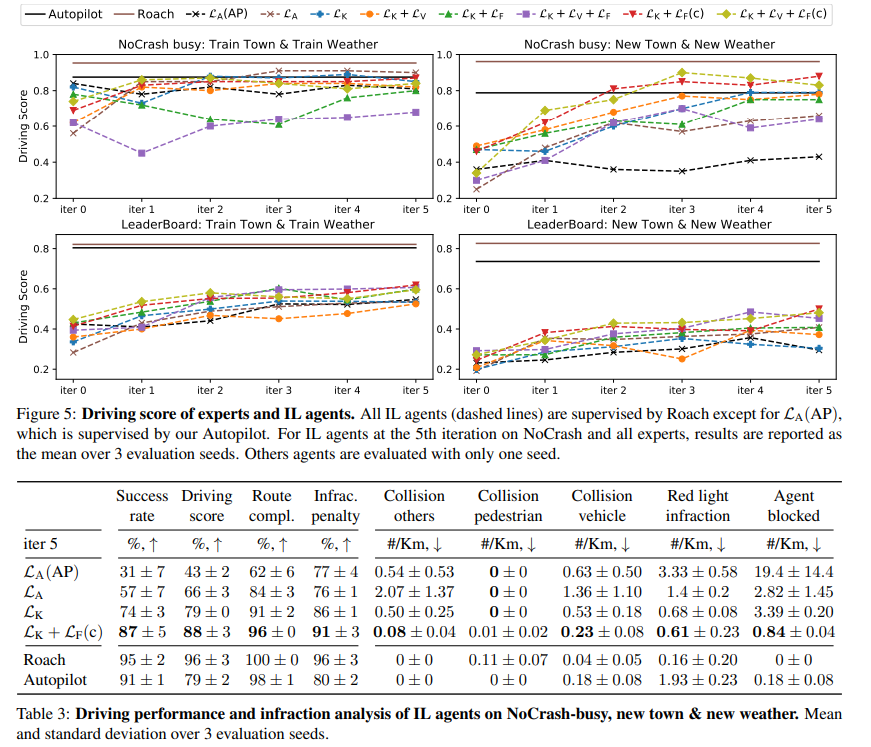
【推荐理由】自动驾驶的端到端方法通常依赖于专家演示。尽管人类是优秀的司机,但对于需要密集政策监督的端到端算法,他们并不是很好的教练。相反,利用特权信息的自动化专家可以有效地生成大规模的策略内和策略外演示。然而,现有的城市驾驶自动化专家大量使用手工制定的规则,即使在可以获得地面实况信息的驾驶模拟器上也表现不佳。为了解决这些问题,本文训练了强化学习将鸟瞰图图像映射到连续的低级动作的专家。同时设定了新的性能上CARLA上限,其专家也是一个更好的教练,提供信息丰富的监督信号,模仿学习智能体学习的。在强化 学习教练的监督下,具有单目摄像头输入的基线端到端代理实现了专家级性能。本文端到端的智能体实现了 78% 的成功率,同时在 NoCrash-dense 基准上推广到新城镇和新天气,并在更具挑战性的 CARLA 排行榜上获得了极佳的性能。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢